基于TMS320F2812DSP的測(cè)頻方法的數(shù)字頻率計(jì)的方案設(shè)計(jì)

本文給出一種基于TMS320F2812(簡(jiǎn)稱F2812)DSP的一種簡(jiǎn)易測(cè)頻方法。該方法有效利用F2812的片內(nèi)外設(shè)事件管理器的捕獲功能,在被測(cè)信號(hào)的有效電平跳變沿捕獲計(jì)數(shù),電路實(shí)現(xiàn)多靠軟件設(shè)置,運(yùn)算簡(jiǎn)單,實(shí)時(shí)性好,測(cè)量精度高。
1 測(cè)量方法
常用的測(cè)頻方法主要有直接測(cè)頻法、直接測(cè)周法以及多周期測(cè)量法。直接測(cè)頻法雖在高頻段的精度較高,但在低頻段的精度較低,直接測(cè)周法則恰恰相反。多周期測(cè)量法是將被測(cè)信號(hào)和標(biāo)準(zhǔn)信號(hào)分別輸入到兩個(gè)計(jì)數(shù)器,其實(shí)際閘門時(shí)間不是固定值,而是被測(cè)信號(hào)周期的整數(shù)倍,因此消除了對(duì)被測(cè)信號(hào)計(jì)數(shù)時(shí)產(chǎn)生的±1 Hz的計(jì)數(shù)誤差,其精度僅與閘門時(shí)間和標(biāo)準(zhǔn)頻率有關(guān)。因此本設(shè)計(jì)采用多周期測(cè)量法作為具體的實(shí)施方案。
2 系統(tǒng)的設(shè)計(jì)
2.1 系統(tǒng)的硬件設(shè)計(jì)
硬件系統(tǒng)總體框圖如圖1所示。被測(cè)信號(hào)首先經(jīng)過(guò)限幅放大、直流偏置、整形電路,變換為0~3.3 V的方波信號(hào),然后再進(jìn)入DSP,利用其定時(shí)器和捕獲單元實(shí)現(xiàn)頻率的測(cè)量。測(cè)量完成后,一方面可由鍵盤設(shè)置相關(guān)參數(shù)通過(guò)LCD顯示測(cè)量結(jié)果,另一方面可通過(guò)RS一232傳送給PC機(jī)顯示測(cè)量結(jié)果。另外,為了提高系統(tǒng)的可靠性,增加了一個(gè)自我校準(zhǔn)電路,即在測(cè)量之前,可通過(guò)軟件設(shè)置產(chǎn)生1 MHz的標(biāo)準(zhǔn)脈沖信號(hào),送到信號(hào)調(diào)理模塊的輸入端,檢測(cè)測(cè)量結(jié)果是否正確,從而達(dá)到自我校準(zhǔn)的目的。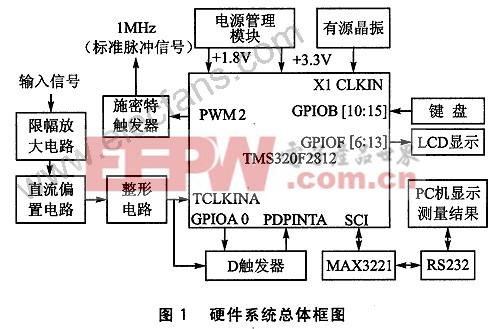
本設(shè)計(jì)選用美國(guó)德州儀器公司(TI)的TMS320F2812DSP作為核心處理單元。F2812是TI公司近幾年推出的高速、高精度的工業(yè)控制DSP芯片。它運(yùn)算速度快,工作時(shí)鐘頻率達(dá)150 MHz,指令周期可以達(dá)到6.67 ns以內(nèi),低功耗(核心電壓1.8 V,I/O口電壓3.3 V)。它采用哈佛總線結(jié)構(gòu),具有強(qiáng)大的操作能力;外圍設(shè)備包括3個(gè)32位的CPU定時(shí)器,16通道的12位A/D轉(zhuǎn)換器,串行外圍接口(SPI),2個(gè)串行通信接口(SCI)等。其片內(nèi)外設(shè)時(shí)間管理器含有2個(gè)模塊(EVA和EVB),每個(gè)模塊都包括2個(gè)通用定時(shí)器,3個(gè)全比較/PWM單元,3個(gè)捕獲單元和 1個(gè)正交編碼脈沖電路。本設(shè)計(jì)主要利用EVA中的2個(gè)通用定時(shí)器(T1和T2),2個(gè)捕獲單元(CAPl和CAP3),EVB中的1個(gè)通用定時(shí)器 (T3)。具體測(cè)量原理如圖2所示。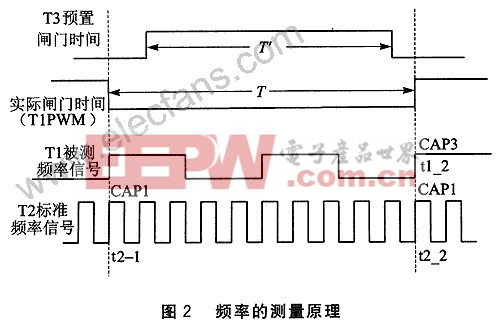
首先設(shè)定T3比較值(預(yù)置閘門時(shí)間為0.012 8 s),設(shè)定T1的比較值為1,使能CAPl。然后使能T1,當(dāng)其接收到一個(gè)整周期的被測(cè)信號(hào)時(shí)即可產(chǎn)生比較輸出,同時(shí)產(chǎn)生比較中斷,讀取CAPl的棧值 (即T2的初值t2_1),清T1、T2上溢次數(shù),使能CAP3和T3。最后當(dāng)T3定時(shí)結(jié)束,借助于D觸發(fā)器在被測(cè)信號(hào)的下一個(gè)上升沿到來(lái)時(shí),切斷T1的比較輸出,同時(shí)PDPINTA將被置位,然后記錄T1和T2的上溢次數(shù)tlofcount、t2ofcount,讀取CAPl的棧值(即T2的末值 t2_2)和CAP3的棧值(即T1的末值tl_2)。由所得數(shù)據(jù)計(jì)算頻率,禁止T1、T2、CAPl和CAP3。頻率計(jì)算公式為:
注意:CAPl的捕獲時(shí)基為T2,CAP3的捕獲時(shí)基為T1,標(biāo)準(zhǔn)頻率信號(hào)為150 MHz時(shí)鐘頻率的8分頻。
2.2 系統(tǒng)的軟件設(shè)計(jì)
主監(jiān)控程序是整個(gè)軟件系統(tǒng)的總調(diào)度程序,它控制著程序的有序運(yùn)行。系統(tǒng)在上電或復(fù)位后,主程序先調(diào)用各模塊的初始化子程序,主要包括GPIO初始化、PIE初始化、EV初始化和SCI初始化。系統(tǒng)初始化完成之后,主程序啟動(dòng)CPU_Timer0,使能 T1、T2的上溢中斷,啟動(dòng)CAPl,設(shè)置T1的比較值為1,等待T1CINT置位,開(kāi)始測(cè)量頻率。為減小測(cè)量過(guò)程中產(chǎn)生的隨機(jī)誤差,所測(cè)結(jié)果均取平均值。利用CPU_Timer0產(chǎn)生一定的時(shí)間段(O.6s)。該時(shí)段結(jié)束后(CPU_TimerO中斷標(biāo)志位置位),即對(duì)該段時(shí)間段內(nèi)記錄的測(cè)量結(jié)果求均值。此時(shí),如果查詢到上位機(jī)發(fā)出接收請(qǐng)求,則傳送相應(yīng)數(shù)據(jù)至PC顯示。然,后,重新初始化定時(shí)器和捕獲單元,進(jìn)入下一輪測(cè)量。主監(jiān)控程序流程如圖3所示。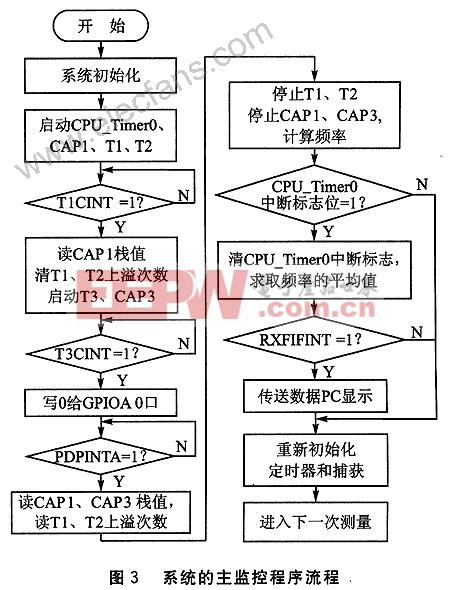
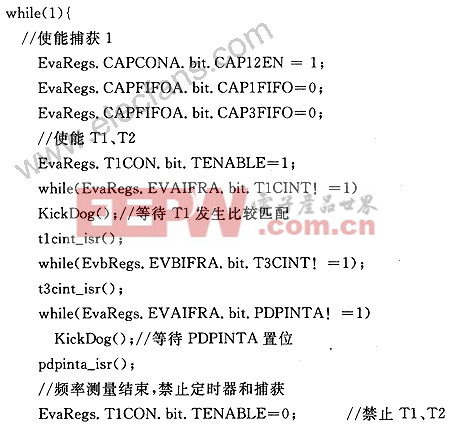
測(cè)頻的部分源代碼如下:

關(guān)鍵詞:
頻率
方案設(shè)計(jì)
數(shù)字
方法
TMS320F2812DSP
基于
相關(guān)推薦









技術(shù)專區(qū)
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機(jī)
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線
- 開(kāi)關(guān)電源
- 單片機(jī)
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩(wěn)壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開(kāi)發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機(jī)控制
- 藍(lán)牙
- PLC
- PWM
- 汽車電子
- 轉(zhuǎn)換器
- 電源管理
- 信號(hào)放大器
評(píng)論