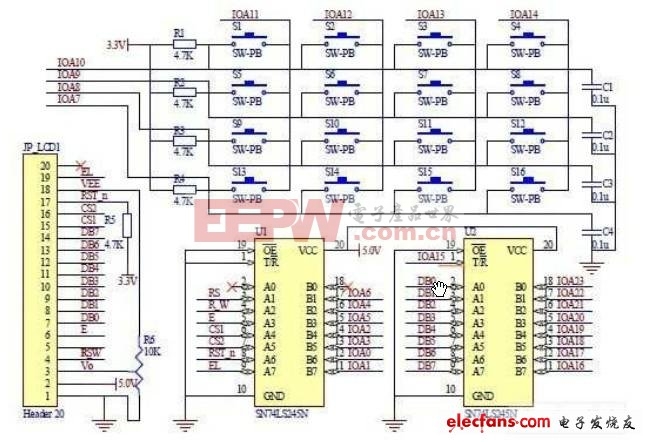
基于PLD的矩陣鍵盤狀態(tài)機(jī)控制

parameter SCAN_IDLE = 3'b000;
parameter SCAN_JITTER= 3'b001;
parameter SCAN_COL0 = 3'b011;
parameter SCAN_COL1 = 3'b010;
parameter SCAN_COL2 = 3'b110;
parameter SCAN_COL3 = 3'b100;
parameter SCAN_READ = 3'b101;
parameter SCAN_JTTTER2= 3'b111;
reg [2:0] current_state;
reg [2:0] next_state;
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
current_state = SCAN_IDLE;
else if(cnt == 20'hfffff)
current_state = next_state;
end
always@*
begin
case(current_state)
SCAN_IDLE : //init
if(col_data != 4'b1111) next_state = SCAN_JITTER;
else next_state = SCAN_IDLE;
SCAN_JITTER: //escape the jitter
if(col_data != 4'b1111) next_state = SCAN_COL0;
else next_state = SCAN_IDLE;
SCAN_COL0 : //1th row
if(col_data != 4'b1111) next_state = SCAN_READ;
else next_state = SCAN_COL1;
SCAN_COL1 : //2th row
if(col_data != 4'b1111) next_state = SCAN_READ;
else next_state = SCAN_COL2;
SCAN_COL2 : //3th row
if(col_data != 4'b1111) next_state = SCAN_READ;
else next_state = SCAN_COL3;
SCAN_COL3 : //4th row
if(col_data != 4'b1111) next_state = SCAN_READ;
else next_state = SCAN_IDLE;
SCAN_READ : //lock the vaule
if(col_data != 4'b1111) next_state = SCAN_JTTTER2;
else next_state = SCAN_IDLE;
SCAN_JTTTER2: //when your hand is gone
if(col_data != 4'b1111) next_state = SCAN_JTTTER2;
else next_state = SCAN_IDLE;
endcase
end




評論