ARM·Nand Flash的控制

static void s3c2440_write_addr_lp(unsigned int addr)
{
int i;
volatile unsigned char *p = (volatile unsigned char *)&s3c2440nand->NFADDR;
int col, page;
col = addr & NAND_BLOCK_MASK_LP;
page = addr / NAND_SECTOR_SIZE_LP;
*p = col & 0xff;
for(i=0; i<10; i++);
*p = (col >> 8) & 0x0f;
for(i=0; i<10; i++);
*p = page & 0xff;
for(i=0; i<10; i++);
*p = (page >> 8) & 0xff;
for(i=0; i<10; i++);
*p = (page >> 16) & 0x03;
for(i=0; i<10; i++);
}
static unsigned char s3c2440_read_data(void)
{
}
static void nand_reset(void)
{
}
static void wait_idle(void)
{
}
static void nand_select_chip(void)
{
}
static void nand_deselect_chip(void)
{
}
static void write_cmd(int cmd)
{
}
static void write_addr(unsigned int addr)
{
}
static unsigned char read_data(void)
{
}
void nand_init(void)
{
#define TACLS
#define TWRPH0
#define TWRPH1
#ifdef LARGER_NAND_PAGE
#else
nand_chip.write_addr = s3c2440_write_addr;
#endif
}
void nand_read(unsigned char *buf, unsigned long start_addr, int size)
{
#ifdef LARGER_NAND_PAGE
#else
#endif
#ifdef LARGER_NAND_PAGE
#endif
#ifdef LARGER_NAND_PAGE
#else
#endif
}
這一長串紅色的代碼也就是Nand Flash的初始化,我們可以仔細(xì)的分析一下Nand的控制寄存器
再看代碼,從head.s中也就跳轉(zhuǎn)到了nand.c中的灰色部分 ;
1)S3C2410和S3C2440的一個(gè)判斷
2)定義了一個(gè)結(jié)構(gòu)體
#ifdef LARGER_NAND_PAGE
#else
nand_chip.write_addr = s3c2440_write_addr;
#endif
*上面定義了結(jié)構(gòu)體,右邊一列都是s3c2440中可以調(diào)用的函數(shù) ;
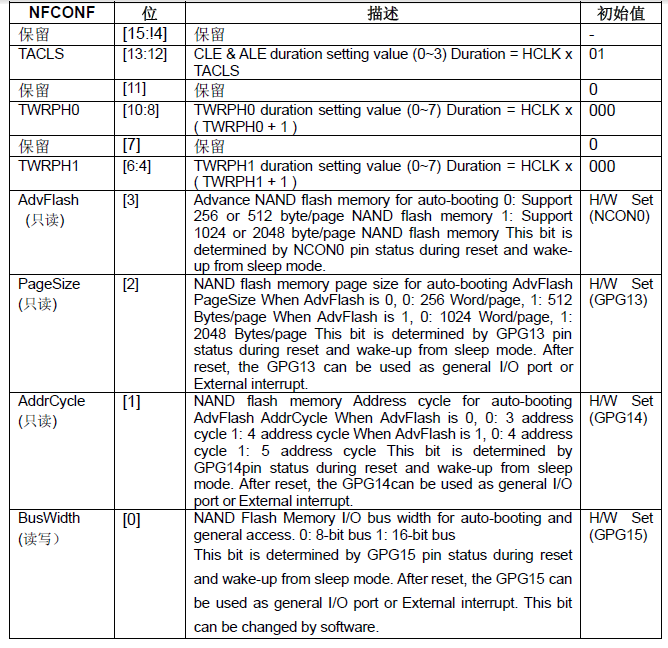
*在設(shè)置時(shí)序中:【NFCONF】寄存器
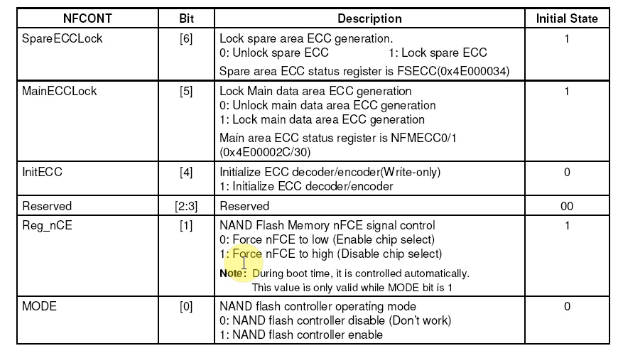
使能NAND Flash控制器,初始化ECC,禁止片選 :【NFCONT】寄存器
(我覺得了解一下就好了,還真的去看時(shí)序啊,那個(gè)老師都沒說的清楚,估計(jì)是默認(rèn)值)
【NFCONF】
【NFCONT】

關(guān)鍵詞:
ARMNandFlas
相關(guān)推薦
技術(shù)專區(qū)
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機(jī)
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線
- 開關(guān)電源
- 單片機(jī)
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩(wěn)壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機(jī)控制
- 藍(lán)牙
- PLC
- PWM
- 汽車電子
- 轉(zhuǎn)換器
- 電源管理
- 信號放大器
評論