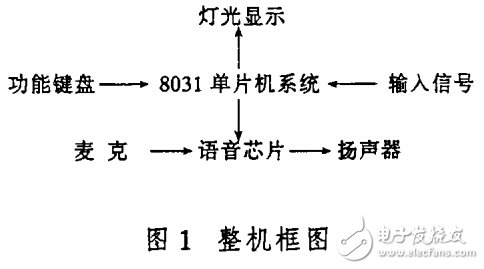
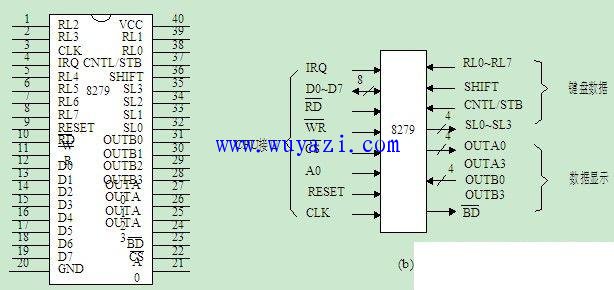
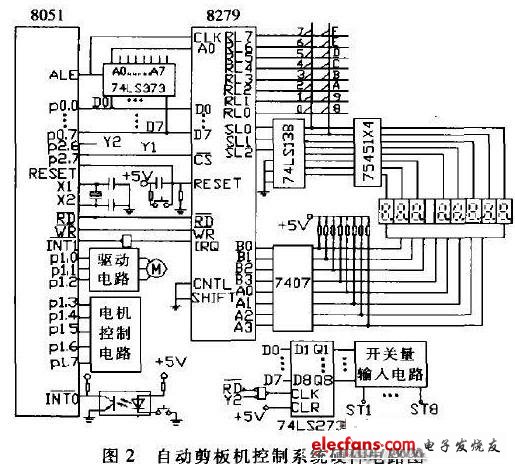
以單片機(jī)8031為核心����, 利用8279芯片實(shí)現(xiàn)按鍵輸入和利用數(shù)碼管顯示所測(cè)轉(zhuǎn)速�,利用ADC0809將輸入電壓模擬量轉(zhuǎn)化為數(shù)字量(實(shí)驗(yàn)箱內(nèi)部已接好相關(guān)接口)控制電機(jī)轉(zhuǎn)速的目的。然后利用DA0832將電機(jī)上的傳感器配合DA0832的CKMOT接口將脈沖信號(hào)接到8031的INT0��,利用外中斷實(shí)現(xiàn)速度的測(cè)量����,一次外中斷會(huì)使速度計(jì)數(shù)器自動(dòng)加一,利用定時(shí)器產(chǎn)生一秒的計(jì)時(shí)�,得出一秒內(nèi)速度計(jì)數(shù)器的值就可以得到電機(jī)的轉(zhuǎn)速。另定時(shí)計(jì)數(shù)器每250MS產(chǎn)生一次定時(shí)器中斷��,利用中斷來(lái)檢測(cè)是否有新的控制信號(hào)輸入����,以達(dá)到實(shí)時(shí)控制轉(zhuǎn)速的目的���。
ORG 0000hajmp mainORG 0003h ;外部中斷0AJMP ZSORG 000BH ;定時(shí)計(jì)數(shù)器0中斷AJMP JSORG 0100Hmain: mov sp,#60hCLR PSW.5 ;清零標(biāo)志位SETB P1.0 ;置位檢測(cè)位setb et0SETB IT0 ;外部中斷0下降沿有效SETB EX0 ;允許T0中斷mov DPTR,#5FFFH ;8279初始化MOV A,#0DCHMOVX @DPTR,AWAIT: MOVX A,@DPTRJB ACC.7,WAITMOV A,#00HMOVX @DPTR,AMOV A,#34HMOVX @DPTR,AMOV R0,#30H ;清零所用數(shù)值緩沖區(qū)CL: MOV A,#00HMOV @R0,AINC R0CJNE R0,#36H,CLMOV 36H,#200MOV 37H,#20ACALL DIRTIME: MOV TMOD,#02H ;一秒定時(shí)MOV TH0,#6MOV TL0,#6SETB TR0 ;開(kāi)啟T0中斷SETB EALOP2: JNB PSW.5,LOP3CLR PSW.5ACALL DIR ;到一秒顯示轉(zhuǎn)速JMP LOP2LOP3: MOV DPTR,#9FF4H ;啟動(dòng)a/dMOVX @DPTR,A;ACALL DELAY1JB P1.0, $MOVX A,@DPTRMOV DPTR,#7FFFH ;啟動(dòng)d/aMOVX @DPTR,AAJMP LOP2JS: PUSH ACC ;T0中斷子程序DJNZ 36H,OUTDJNZ 37H,nextajmp next1 next: MOV 36H,#200ajmp outnext1:SETB PSW.5MOV 33H,30HMOV 34H,31HMOV 35H,32HMOV 30H,#0MOV 31H,#0MOV 32H,#0MOV 36H,#200MOV 37H,#20OUT: POP ACCRETIZS: PUSH ACC ;外部中斷子程序CLR EX0MOV A,30HADD A,#1DA AMOV 30H,ACJNE A,#99H,OUT1MOV 30H,#0MOV A,31HADD A,#1DA AMOV 31H,ACJNE A,#99H,OUT1MOV 31H,#0MOV A,32HADD A,#1DA AMOV 32H,AOUT1: SETB EX0POP ACCRETI DIR: MOV R0,#33HMOV DPTR,#5FFFHMOV A,#92HMOVX @DPTR,AMOV R2,#03HLED: MOV A,@R0ANL A,#0FHMOV DPTR,#LEDTABMOVC A,@A+DPTRMOV DPTR,#5EFFHMOVX @DPTR,AMOV A,@R0SWAP AANL A,#0FHMOV DPTR,#LEDTABMOVC A,@A+DPTRMOV DPTR,#5EFFHMOVX @DPTR,AINC R0DJNZ R2,LEDRETLEDTAB:DB 0c0H,0f9H,0a4H,0b0H,99H,92H,82H,0f8H,80H,90HDELAY1: MOV R6,#5DELAY2: MOV R7,#200DJNZ R7,$DJNZ R6,DELAY2 RETEND



評(píng)論