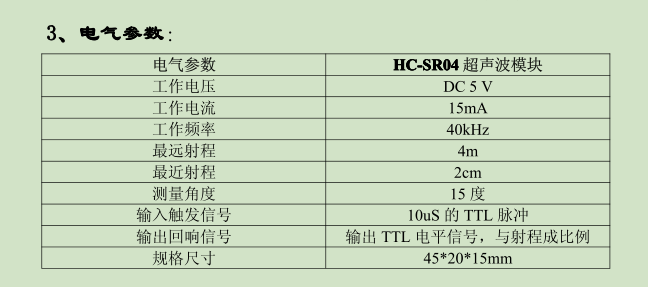
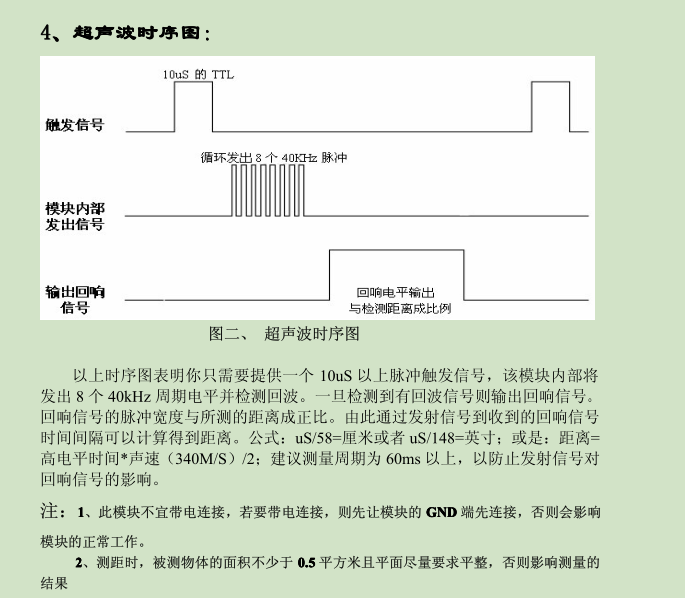
超聲波測(cè)距模塊參數(shù)
超聲波測(cè)距模塊內(nèi)部電路圖
本文引用地址:http://m.butianyuan.cn/article/201611/322501.htm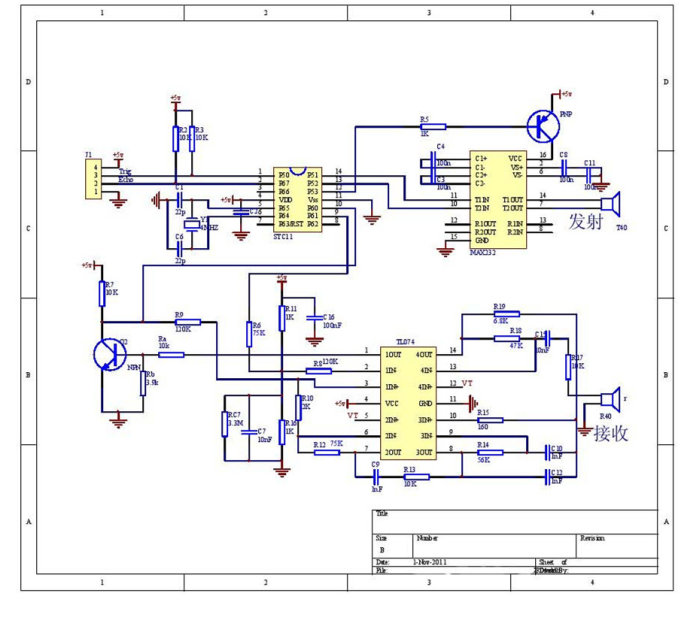
超聲波測(cè)距模塊與51單片機(jī)連接電路圖

51單片機(jī)C語(yǔ)言參考程序
#include //調(diào)用單片機(jī)頭文件
#define uchar unsigned char//無(wú)符號(hào)字符型宏定義變量范圍0~255
#define uintunsigned int//無(wú)符號(hào)整型 宏定義變量范圍0~65535
#include
#include "eeprom52.h"
sbit c_send= P3^3;//超聲波發(fā)射
sbit c_recive = P3^2;//超聲波接收
//這三個(gè)引腳參考資料
sbit rs=P1^0;//1602數(shù)據(jù)/命令選擇引腳 H:數(shù)據(jù)L:命令
sbit rw=P1^1;//1602讀寫(xiě)引腳H:數(shù)據(jù)寄存器L:指令寄存器
sbit e =P1^2;//1602使能引腳下降沿觸發(fā)
uchar code table_num[]="0123456789abcdefg";
sbit beep = P1^4;//蜂鳴器IO口定義
bit flag_300ms ;
long distance;//距離
uint set_d;//距離
bit flag_csb_juli;//超聲波超出量程
uintflag_time0;//用來(lái)保存定時(shí)器0的時(shí)候的
uchar menu_1;//菜單設(shè)計(jì)的變量
void delay_1ms(uint q)
{
uint i,j;
for(i=0;i
for(j=0;j<120;j++);
}
void write_eeprom()//保存數(shù)據(jù)
{
SectorErase(0x2000);
byte_write(0x2000, set_d % 256);
byte_write(0x2001, set_d / 256);
byte_write(0x2058, a_a);
}
void read_eeprom()//讀出保存數(shù)據(jù)
{
set_d= byte_read(0x2001);
set_d <<= 8;
set_d|= byte_read(0x2000);
a_a= byte_read(0x2058);
}
//
void init_eeprom()////開(kāi)始初始化保存的數(shù)據(jù)
{
read_eeprom();//讀出保存數(shù)據(jù)
if(a_a != 2)//新的單片機(jī)初始單片機(jī)內(nèi)問(wèn)EEPOM
{
set_d = 50;
a_a = 2;
write_eeprom();//保存數(shù)據(jù)
}
}
void delay_uint(uint q)
{
while(q--);
}
void write_com(uchar com)
{
e=0;
rs=0;
rw=0;
P0=com;
delay_uint(25);
e=1;
delay_uint(100);
e=0;
}
void write_data(uchar dat)
{
e=0;
rs=1;
rw=0;
P0=dat;
delay_uint(25);
e=1;
delay_uint(100);
e=0;
}
void write_string(uchar hang,uchar add,uchar *p)
{
if(hang==1)
write_com(0x80+add);
else
write_com(0x80+0x40+add);
while(1)
{
if(*p ==
