基于FPGA的錯(cuò)誤檢測(cè)與糾正電路的方案設(shè)計(jì)

引 言
在一些電磁環(huán)境比較惡劣的情況下,一些大規(guī)模集成電路常常會(huì)受到干擾,導(dǎo)致不能正常工作。特別是像RAM這種利用雙穩(wěn)態(tài)進(jìn)行存儲(chǔ)的器件,往往會(huì)在強(qiáng)干擾下發(fā)生翻轉(zhuǎn),使原來(lái)存儲(chǔ)的0變?yōu)?,或者1變?yōu)?,造成的后果往往是很嚴(yán)重的。例如導(dǎo)致一些控制程序跑飛,存儲(chǔ)的關(guān)鍵數(shù)據(jù)出錯(cuò)等等?,F(xiàn)在,隨著芯片集成度的增加,發(fā)生錯(cuò)誤的可能性也在增大。在一些特定的應(yīng)用中,這已經(jīng)成為一個(gè)不能忽視的問(wèn)題。例如在空間電子應(yīng)用領(lǐng)域,單粒子翻轉(zhuǎn)效應(yīng)就成為困擾設(shè)計(jì)師的一個(gè)難題。
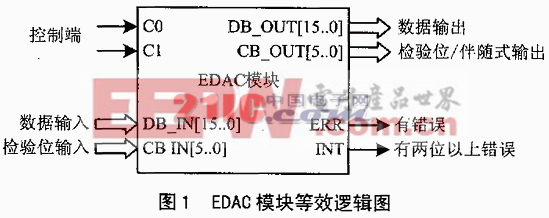
在這種情況下,我們可以采用錯(cuò)誤檢測(cè)與糾正EDAC(Error Detection And Correction)電路來(lái)有效地減少或避免這種情況的出現(xiàn)。根據(jù)檢錯(cuò)、糾錯(cuò)的原理,主要思想是在數(shù)據(jù)寫入時(shí),根據(jù)寫入的數(shù)據(jù)生成一定位數(shù)的校驗(yàn)碼,與相應(yīng)的數(shù)據(jù)一起保存起來(lái);當(dāng)讀出時(shí),同時(shí)也將校驗(yàn)碼讀出,進(jìn)行判決。如果出現(xiàn)一位錯(cuò)誤則自動(dòng)糾正,將正確的數(shù)據(jù)送出,并同時(shí)將改正以后的數(shù)據(jù)回寫覆蓋原來(lái)錯(cuò)誤的數(shù)據(jù);如果出現(xiàn)兩位錯(cuò)誤則產(chǎn)生中斷報(bào)告,通知CPU進(jìn)行異常處理。所有這一切動(dòng)作都是靠硬件設(shè)計(jì)自動(dòng)完成的,具有實(shí)時(shí)性和自動(dòng)完成的特點(diǎn)。通過(guò)這樣的EDAC電路,能大大提高系統(tǒng)的抗干擾能力,從而提高系統(tǒng)的可靠性。
當(dāng)然,有一些現(xiàn)成的集成電路芯片可以完成上述功能,如74系列的74630芯片等。但由于嵌入式系統(tǒng)中,往往由于集成化的需要,要將這樣的功能集成到FPGA中去實(shí)現(xiàn),因此采用VHDL語(yǔ)言進(jìn)行設(shè)計(jì)具有靈活性和通用性的特點(diǎn)。
1 檢錯(cuò)與糾錯(cuò)原理
首先來(lái)看看檢錯(cuò)和糾錯(cuò)的基本原理。進(jìn)行差錯(cuò)控制的基本思想是在信息碼組中以一定規(guī)則加入不同方式的冗余碼,以便在信息讀出的時(shí)候依靠多余的監(jiān)督碼或校驗(yàn)碼來(lái)發(fā)現(xiàn)或自動(dòng)糾正錯(cuò)誤。
針對(duì)誤碼發(fā)生的特點(diǎn),即錯(cuò)誤發(fā)生的隨機(jī)性和小概率性,它幾乎總是隨機(jī)地影響某個(gè)字節(jié)中的某一位(bit),因此,如果能夠設(shè)計(jì)自動(dòng)糾正一位錯(cuò)誤,而檢測(cè)兩位錯(cuò)誤的編碼方式,就可以大大的提高系統(tǒng)的可靠性。
現(xiàn)在我們以16位的CPU數(shù)據(jù)總線為例,假定信息源的位數(shù)為16,要構(gòu)造一種能夠糾正一位錯(cuò)誤,檢查兩位錯(cuò)誤的編碼方式。根據(jù)糾錯(cuò)定理,需要設(shè)計(jì)最小漢明距離≥4的碼組。我們可以采用線形分組碼,利用線性分組碼的概念可以構(gòu)造六位監(jiān)督碼,它們由如下線性關(guān)系產(chǎn)生: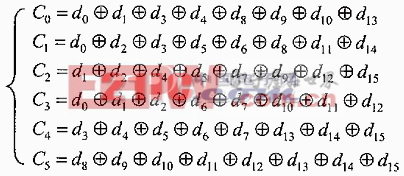
其中,d0~d15為16位數(shù)據(jù)(15為最高位MSB,0為最低位LSB),C0~C5為產(chǎn)生的六位監(jiān)督碼,表示進(jìn)行異或運(yùn)算。
在數(shù)據(jù)讀出時(shí),我們只需要考察伴隨式S=[S0 S1 S2 S3 S4 S5],其中: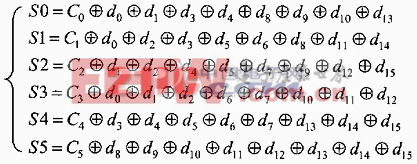
很容易證明,根據(jù)伴隨式進(jìn)行誤差診斷,符合表1所列情況。
表1 誤差診斷碼表
表1 誤差診斷碼表
| 伴隨式 | 錯(cuò) 誤 位 置 | ||||||||||||||||||||||
數(shù) 據(jù) 位 | 校 驗(yàn) 位 | 無(wú)錯(cuò) | |||||||||||||||||||||
| d0 | d1 | d2 | d3 | d4 | d5 | d6 | d7 | d8 | d9 | d10 | d11 | d12 | d13 | d14 | d15 | C0 | C1 | C2 | C3 | C4 | C5 | ||
| S0 | 1 | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| S1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| S2 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| S3 | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| S4 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| S5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
當(dāng)S = [0 0 0 0 0 0]時(shí),數(shù)據(jù)正確無(wú)誤;
當(dāng)S = [0 0 1 0 1 1]時(shí),數(shù)據(jù)錯(cuò)一位,并且錯(cuò)誤發(fā)生在d0位,可將d0位的數(shù)據(jù)取反加以糾正;
當(dāng)S = [0 0 1 1 0 1]時(shí),數(shù)據(jù)錯(cuò)一位,并且錯(cuò)誤發(fā)生在d1位,可將d1位的數(shù)據(jù)取反加以糾正;
.
.
.
當(dāng)S= [1 1 0 1 0 0]時(shí),數(shù)據(jù)錯(cuò)一位,并且錯(cuò)誤發(fā)生在d15位,可將d15位的數(shù)據(jù)取反加以糾正;
當(dāng)S = [0 0 0 0 0 1]時(shí),數(shù)據(jù)錯(cuò)一位,并且錯(cuò)誤發(fā)生在C0位;
.
.
.
當(dāng)S = [1 0 0 0 0 0]時(shí),數(shù)據(jù)錯(cuò)一位,并且錯(cuò)誤發(fā)生在C5位;
當(dāng)S為其它情況時(shí),至少發(fā)生兩位錯(cuò)誤。
可以看出,這種編碼方式可以滿足自動(dòng)糾正一位錯(cuò)誤,而發(fā)現(xiàn)兩位錯(cuò)誤的要求。下面就進(jìn)一步討論如何用電路來(lái)實(shí)現(xiàn)。

DIY機(jī)械鍵盤相關(guān)社區(qū):機(jī)械鍵盤DIY
相關(guān)推薦











技術(shù)專區(qū)
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機(jī)
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線
- 開關(guān)電源
- 單片機(jī)
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩(wěn)壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機(jī)控制
- 藍(lán)牙
- PLC
- PWM
- 汽車電子
- 轉(zhuǎn)換器
- 電源管理
- 信號(hào)放大器
評(píng)論