AU 1200 MAE驅(qū)動(dòng)程序開(kāi)發(fā)流程

1 MAE概述
MAE是AU 1200的片上硬件設(shè)備,除了可以實(shí)現(xiàn)視頻解碼功能外,還可以完成色彩空間轉(zhuǎn)換、濾波等工作。MAE在硬件結(jié)構(gòu)上可以分為前端和后端兩部分,各自完成一些特定的功能。MAE前端主要完成視頻的實(shí)時(shí)解碼,包括反量化、IDCT、運(yùn)動(dòng)補(bǔ)償?shù)?;而后端主要完成圖像的濾波、色彩空間轉(zhuǎn)換等。除此之外,MAE還可以通過(guò)AU 1200片上外設(shè)CIM(Camera InteRFaceModule)處理從攝像頭獲取的數(shù)據(jù)。MAE使AU 1200的MIPS32核不用再因?yàn)橐曨l的實(shí)時(shí)解碼而產(chǎn)生大量的開(kāi)銷。從而使其能夠?qū)W⒂谕瓿山涌?、音頻處理等其他任務(wù),這樣一來(lái)大大提高了系統(tǒng)的工作效率。MAE支持的視頻Codec格式包括:MPEG-2 Main Profile@Main Level,MPEG- Advanced Simple Profile @ Level 5,WMV 9 Media Profile @ Medium Level,最高支持D1 30 f/s的實(shí)時(shí)解碼。
2 開(kāi)發(fā)環(huán)境的建立
硬件開(kāi)發(fā)板采用華恒科技的HHAU 1200,該板提供豐富的接口,并已將Bootloader固化在板上的FLASH當(dāng)中,通過(guò)燒寫工具可對(duì)其軟件系統(tǒng)進(jìn)行更新升級(jí)。只要建立交叉編譯環(huán)境便可在HHAU 1200上開(kāi)發(fā)硬件設(shè)備驅(qū)動(dòng)程序和應(yīng)用程序。
2.1 宿主機(jī)開(kāi)發(fā)環(huán)境的建立
宿主機(jī)(PC)通過(guò)串口線連接至開(kāi)發(fā)板的串口1,同時(shí)通過(guò)交叉網(wǎng)線連接至開(kāi)發(fā)板的網(wǎng)口。宿主機(jī)安裝Red Hat Linux操作系統(tǒng),所安裝的版本是EnterpriseLinux AS4,建議采用完全安裝。由于HHAU 1200開(kāi)發(fā)板在燒寫時(shí)默認(rèn)的IP為192.168.2.222,所以PC機(jī)的IP也要設(shè)置在該網(wǎng)段。在Linux PC下配置好NFS(為交叉開(kāi)發(fā)時(shí)Mount所用)、TFTP服務(wù)器(為下載燒寫所用)和Minicom。以上幾項(xiàng)配置好后啟動(dòng)Minicom,當(dāng)開(kāi)發(fā)板上電后便可看到啟動(dòng)信息。
在PC的Linux終端提示符下鍵入mount-onolock 192.168.2.222://mnt,即把AU 1200開(kāi)發(fā)板根目錄下的所有文件和目錄Mount到宿主機(jī)Linux下的mnt目錄,在Linux終端提示符下可通過(guò)ls命令查看。
2.2 交叉編譯工具鏈的建立
按照以下步驟:
(1)下載交叉編譯工具軟件包mipsel-linux-gcc-sdk-3.4.4-i386.tar.gz,解包至/opt路徑下;
(2)添加交叉編譯工具環(huán)境變量:修改/etc/profile文件,在文件末尾添加export PATH=$PATH:/opt/mipsel-linux-gcc-sdk-3.4.4/cross/bin;
(3)使新的環(huán)境變量生效:#source/etc/profile;
(4)檢查是否將路徑加入PATH:#echo$PATH,若顯示的內(nèi)容中有上述路徑,說(shuō)明已經(jīng)將交叉編譯工具的路徑加入PATH;
(5)用hello.c進(jìn)行交叉編譯測(cè)試:編譯出的可執(zhí)行文件用file命令查看其屬性可得到如圖1所示信息。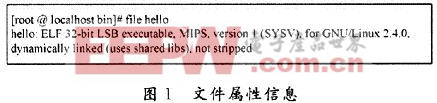
這說(shuō)明交叉編譯工具可以正常使用,編譯出的可執(zhí)行文件可以在MIPS處理器上直接運(yùn)行。
3.MAE前端驅(qū)動(dòng)軟件設(shè)計(jì)及測(cè)試
3.1 驅(qū)動(dòng)軟件設(shè)計(jì)
MAE可分為前端和后端,前端的主要功能是完成多種視頻格式的實(shí)時(shí)解碼,其方框圖如圖2所示。
MAE前端的輸入數(shù)據(jù)是一系列的數(shù)據(jù)宏塊,宏塊數(shù)據(jù)以及頭信息、系數(shù)矩陣、運(yùn)動(dòng)向量等都以DMA的方式傳送給MAE。所以在程序中首先要定義指針maefe_dmadscr[PTR]來(lái)描述DMA。并把maefe_dreadbell[DB]寄存器設(shè)置為1來(lái)啟動(dòng)DMA控制器。頭信息一共包含4個(gè)word,每個(gè)word有32 b,這4個(gè)word分別保存到AU 1200寄存器mae_hdr0到mae_hdr3中,這些word包含了關(guān)于編碼宏塊的信息,如量化參數(shù),運(yùn)動(dòng)補(bǔ)償參數(shù),變換運(yùn)算等信息。
驅(qū)動(dòng)程序首先要把每一幀的地址寫入MAE的相關(guān)寄存器中,在每處理一幀后,上述宏塊信息都要及時(shí)更新。MAE的前端對(duì)宏塊數(shù)據(jù)進(jìn)行反量化,其結(jié)果輸入至逆變換單元進(jìn)行逆變換運(yùn)算。逆變換運(yùn)算單元通過(guò)查看maefe_config寄存器的COD標(biāo)志位來(lái)決定采用哪種標(biāo)準(zhǔn)的視頻Cod-ec,從而執(zhí)行相應(yīng)的運(yùn)算。逆變換運(yùn)算完成后,數(shù)據(jù)送入運(yùn)動(dòng)補(bǔ)償單元。運(yùn)動(dòng)補(bǔ)償單元根據(jù)運(yùn)動(dòng)向量計(jì)算出參考像素值,并把它們插入當(dāng)前幀中,從而完成一次解碼。以上過(guò)程通過(guò)編寫函數(shù)fe_process_mb來(lái)實(shí)現(xiàn),該函數(shù)的幾個(gè)參數(shù)分別是:
mae_fe_cfg:MAE前端的配置信息;mb_in:輸入的宏塊數(shù)據(jù);cur_y_frame:當(dāng)前幀Y分量;cur_cb_frame:當(dāng)前幀Cb分量;cur_cr_fr-ame:當(dāng)前幀Cr分量;mb_num:表示宏塊數(shù)據(jù)的序號(hào)。該函數(shù)的流程圖如圖3所示。
函數(shù)中的關(guān)鍵部分及說(shuō)明注釋如下所示:
3.2 驅(qū)動(dòng)軟件測(cè)試

關(guān)鍵詞:
流程
程序開(kāi)發(fā)
驅(qū)動(dòng)
MAE
AU
相關(guān)推薦










技術(shù)專區(qū)
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機(jī)
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線
- 開(kāi)關(guān)電源
- 單片機(jī)
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩(wěn)壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開(kāi)發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機(jī)控制
- 藍(lán)牙
- PLC
- PWM
- 汽車電子
- 轉(zhuǎn)換器
- 電源管理
- 信號(hào)放大器
評(píng)論