基于TI MSP430的倒車?yán)走_(dá)的設(shè)計(jì)

系統(tǒng)軟件設(shè)計(jì)
軟件采用模塊化設(shè)計(jì),法式由主法式、測(cè)距子法式和鍵盤顯示子法式、時(shí)鐘顯示子法式等多個(gè)模塊構(gòu)成,調(diào)試過程中對(duì)此中每個(gè)功能模塊和子法式一一調(diào)試大學(xué)生創(chuàng)業(yè)政策,在每個(gè)子法式都完成指定的功能后大學(xué)生創(chuàng)業(yè)基金寧波大學(xué)4支創(chuàng)業(yè)團(tuán)隊(duì)獲甬商大學(xué)生創(chuàng)投基金投資,再進(jìn)行綜合調(diào)試。系統(tǒng)的軟件流程如圖8所示。
圖8 系統(tǒng)軟件流程圖
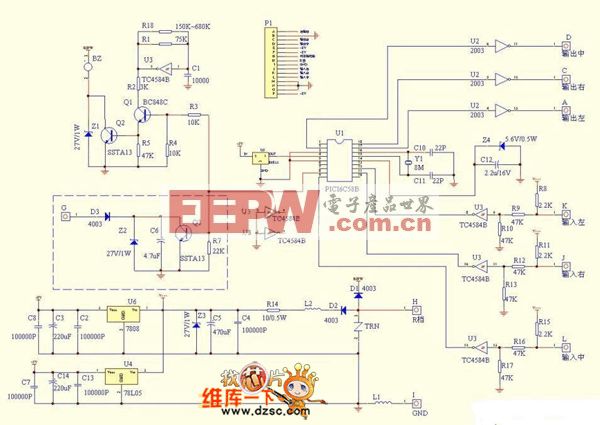
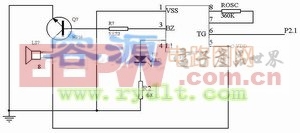
超聲波發(fā)射電發(fā)出超聲波的同時(shí)計(jì)數(shù)器起頭計(jì)數(shù),當(dāng)碰到障礙物反饋旌旗燈號(hào)到超聲波領(lǐng)受器領(lǐng)受,經(jīng)CX20106領(lǐng)受電處置后,發(fā)生一個(gè)低脈沖,該旌旗燈號(hào)傳送給單片機(jī)發(fā)生間斷,挪用測(cè)距子法式,計(jì)較出測(cè)量距離,挪用顯示子法式,按照分歧的測(cè)量數(shù)值在液晶上顯示距離和報(bào)警。當(dāng)距離大于2m,顯示“平安”和測(cè)量距離,繼續(xù)測(cè)量;當(dāng)距離小于1m時(shí),顯示“”和測(cè)量距離,由P1.2位驅(qū)動(dòng)蜂鳴器報(bào)警;當(dāng)距離小于2m且大于1m時(shí),顯示“注重”和測(cè)量距離。為加強(qiáng)抗干擾能力,系統(tǒng)持續(xù)發(fā)射超聲波測(cè)量三次,從中剔除最大最小值,取中心值計(jì)較出切確的距離。如許每秒可測(cè)約三個(gè)數(shù)據(jù),仍然可以知足及時(shí)性要求。
結(jié)語
該倒車?yán)走_(dá)采用了高機(jī)能的MSP430F2274單片機(jī),并充實(shí)操縱了其片上資本使得系統(tǒng)功能豐碩,利用的外圍芯片削減,系統(tǒng)靠得住性獲得提高。該倒車?yán)走_(dá)應(yīng)用于汽車中,當(dāng)駕駛員倒車時(shí),從液晶顯示屏上一目了然便知道障礙物離車的距離,降服了后視鏡小,視野窄的錯(cuò)誤謬誤,消弭了倒車造成的變亂隱患。

關(guān)鍵詞:
MSP
430
倒車?yán)走_(dá)
相關(guān)推薦




技術(shù)專區(qū)
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機(jī)
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線
- 開關(guān)電源
- 單片機(jī)
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩(wěn)壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機(jī)控制
- 藍(lán)牙
- PLC
- PWM
- 汽車電子
- 轉(zhuǎn)換器
- 電源管理
- 信號(hào)放大器
評(píng)論